pytorchでのmulti gpu対応 (DP, DDP, DeepSpeed, Accelerate)
最近SEANというnvidiaが出しているGANのモデルを勉強がてら実装してみたが、その中でDataParallelを使った処理があった。
DataParallelについてpytorchのドキュメントを見てみると、DistributedDataParallelを使えと書いてある。このあたりについて今までちゃんと調べたことはなかったため、良い機会ということで調べてメモ
DPとDDP
DataParallel(DP)
https://pytorch.org/docs/1.13/generated/torch.nn.DataParallel.html
ドキュメントにはこんなwarningが書いてある
It is recommended to use DistributedDataParallel, instead of this class, to do multi-GPU training, even if there is only a single node. See: Use nn.parallel.DistributedDataParallel instead of multiprocessing or nn.DataParallel and Distributed Data Parallel.
- single gpuによる学習時と同じくプロセスが一つだけ
- forward、backwardというgpuでの処理が必要な部分のみ各gpu上で実行されて結果がメインgpuへ戻される
- モデルパラメータの更新はメインとなる一つのgpu上で実行されてから各gpuへ共有される
single gpuで学習する場合とほとんど変わらない形のイメージで、複数gpuの実行が必要な部分の情報共有や集約部分が拡張されたような感じ。マルチノードでの学習はできない。
- pros
- 実装が簡単
- 元のmodelを
model = DDP(model)のようにwrapすれば使える
- 元のmodelを
- 実装が簡単
- cons
- パラメータ共有やinput dataの扱いが非効率的
- マルチノード学習は非対応
DistributedDataParallel(DDP)
https://pytorch.org/docs/1.13/notes/ddp.html
こちらにもwarningが書かれている
The implementation of torch.nn.parallel.DistributedDataParallel evolves over time. This design note is written based on the state as of v1.4.
実装はversoin毎に進化しているので注意とのこと
- gpuの数だけプロセスが作られる
- 各プロセスのdataloaderはプロセス毎に異なるデータを持つよう設定される
- モデルパラメータの共有は最初の一回のみ
- 各プロセス(=gpu)間でgradientが相互に送られて各々和を取ってパラメータ更新に使う
DPと比べ、最初から複数gpuを使って処理する前提で構築されているという印象を受ける形になった。わかりづらい部分としてはパラメータの共有に関する部分で、
- 全gpuが同じ値で初期化されたパラメータを持つ(最初1回の共有)
- 計算が進み、各gpuでgradientが得られる
- 各gpuは異なるinputを与えて処理しているので当然gradientは異なる値
- すべてのgpu間でgradientを共有
そのため、どれか一つのプロセスがデータをまとめて処理するような偏りは起こらないため、そこがボトルネックになるようなこともなく効率的
- pros
- 処理が効率的でボトルネックが発生しない
- マルチノード学習に対応
- cons
- node addressの設定やsetup系の関数を呼び出すなどDDPための実装が必要
- プロセスが別れているためDPに比べてメインメモリは多く消費する
ちなみにDPとDDPの比較については公式のtutorialページに書いてある
https://pytorch.org/tutorials/intermediate/ddp_tutorial.html
処理フローをよりわかりやすく解説してくれていたqiita
https://qiita.com/fam_taro/items/df6061b589c3ccf86089
その他の実装について
DDP
上で書いた通りだが、マルチGPUの学習が行いたい場合はこれを使っておけば問題なく動かすことはできる。 ただし、最近はDDPをwrapしたフレームワークも出てきており、そちらを使っておく方がいいかもしれない。
DeepSpeed
近年の大規模モデルでは一つのgpuではモデル乗り切らずに学習が進められないものがある。そのような大きなモデルでも学習できるよう、各gpuが持つパラメータなどの値を効率化して省メモリ化して動かす方法としてZeROという論文が出ている https://arxiv.org/abs/1910.02054
それの実装としてpytorchのDDPをwrapする形になっているのがDeepSpeed
https://github.com/microsoft/DeepSpeed
gpuの消費メモリを抑えるために以下の3つをそのgpuで必要なものだけ持つ形するというもの
- optimizer state (stage 1)
- gradients (stage 2)
- model parameters (stage 3)
optimizer stateとgradientsは各gpuで必要なもののみしか使う必要がないため、追加で通信して共有する必要もなく元のように全て持っておく場合に比べ通信のオーバーヘッド発生しない。なのでデフォルトでstage 2が使われる形となっている模様。stage 3のようにmodel parameterを削減した場合、step毎に他のgpuからモデルパラメータを追加で共有してもらう必要が出てくるため余計な通信が必要になる。
また、メインメモリへのoffloadなども可能。
1.4Bパラメータを超えるモデルだと、単純にDDPを適用するだけだとv100系のgpuでは学習不可能とのこと
runs out of memory for models with more than 1.4B parameters on current generation of GPUs with 32 GB memory.
- pros
- 巨大なモデルも学習可能
- batch sizeを大きくできる
- cons
- DeepSpeedに則した実装が必要
FullyShardedDataParallel (FSDP)
https://pytorch.org/docs/1.13/fsdp.html
A wrapper for sharding Module parameters across data parallel workers. This is inspired by Xu et al. as well as the ZeRO Stage 3 from DeepSpeed
と書かれておりDeepSpeedと同様ZeROを実装したもの。DeepSpeedのpytorch公式版という感じか
tutorialページ
https://pytorch.org/tutorials/intermediate/FSDP_tutorial.html
As of PyTorch 1.12, FSDP only offers limited support for shared parameters (for example, setting one Linear layer’s weight to another’s).
こういうことも書かれておりbeta版な印象
今後実装が進めばpytorchとの馴染みは当然よいはずなので、実装時の手間が少ないDeepSpeedといった感じになるかも?
Accelerate
huggingfaceが出した各種マルチノード学習の実装に対応したwrapperフレームワーク
https://huggingface.co/docs/accelerate/v0.18.0/en/index
以下のものに対応している
- DDP (default)
- Cloud TPU
- DeepSpeed (beta)
- pytorchのFSDP (beta)
見ての通り複数の実装の違いを吸収してくれるwraperとなっていて、accelerateで実装しておけば設定に応じて各種実装での実行を切り替えられる。
また、実装が大変簡易に済む点が大きい。DDPで動かす場合に必要だったsetup系の関数呼びだしなどは中でやってくれるため、accelerateのインスタンスを作ったらそれに対してbackwardなどを呼び出す形にするだけでOK。
DPと同等の実装の手間でDDPが使えるというイメージ。かつTPUも対応しているのでその辺を使いたい場合はだいぶ楽になりそう。
- pros
- 実装が楽
- 複数の手法やデバイスが同じ実装で使える
- cons
- DeepSpeedやFSDP対応はbetaの状態で動かないケースがある
consに書いた点は注意が必要。例えばGANのような複数モデルを協調して動かす必要がある場合DeepSpeedのモードでは動かせなかった。ドキュメントにも今後破壊的なな変更入るかもしれないから注意、と書いてある。実装をやってみたのでこの点については別記事で書くことにする。
基本的にaccelerateを使うことで実装は楽にできるのでこれを使っておくのが手間という意味ではもっとも良さそうだった。少なくともDDPモードなら問題なくマルチノードで動かすことができた。
diffusionのコア部分をtoy datasetで実装
2022年はdiffusionを利用したtext-to-imageモデルによる画像生成が流行った。 2020年にDDPMの論文が出てから2年程度で実用的な意味でもSoTAな手法になったわけだが、transformerが出てきたときと同じような大きな流れである模様。
diffusionを改善・応用した手法は多く出てきており、それらをちゃんと理解するためにも基本的な部分を実装してみた。
diffusionが最初に出てきたと言われるのは2015年に出たこちらの論文のようだが
https://arxiv.org/abs/1503.03585
実応用として画像がGANのモデルと遜色のないレベルのクオリティで生成できることを初めて示したこちらの論文(DDPM)なのでこれを理解するのが良さそう。
https://arxiv.org/abs/2006.11239
どんなものか?
既にわかりやすい解説記事がたくさん上がっているので勉強には困らなかった。特にわかりやすかったものをまず貼っておく。
- https://data-analytics.fun/2022/02/03/understanding-diffusion-model/
- https://www.youtube.com/watch?v=DDGgKt_CyRQ&list=PLJOBpGoMd1MP3-wWMzBIDazmwk-aAPWjl
詳細はそちらに任せるが勉強のメモとして自分なりにわかったことを概要としてまとめておく。
背景として
- 複雑な特徴を学習するにはパラメータの多い大きなモデルが必要となるが、そのようなモデルは適切な学習やモデルの解析が難しい
- Flow型のような解析しやすいモデルもあるが、その分制約が強いため表現力も控えめになりがち
これらのメリット部分を併せ持つ形となっているのがdiffusion系のモデル。
1ステップを小さなガウシアンノイズの付与として多数回重ね合わせることで目的の分布(複雑な特徴を持つ画像など)を表現できる。1ステップ分の分布は当然目的の分布の学習に比べて容易である。また、その際にかかる数学的な制約はステップの幅を小さくすることだけでありFlow型のような表現力の制約がかからない (ただし、推論に時間がかかるというGANなどと比較した際のデメリットとして表れている)
diffusionのフローを最もよく表しているのが論文のこちらの図
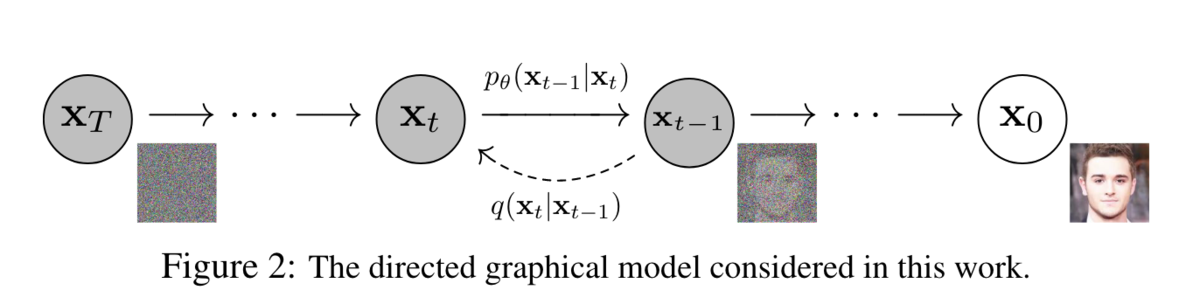
- 元データ(x0)にノイズを徐々に付与して完全なノイズ(xT)にするforward process
- 1step分のノイズ付与をqで表し、これはノイズとその付与割合を決めれば計算できる
- xTに適切なノイズを徐々に付与することでx0を復元するreverse process
- 1step分のノイズ付与をpで表し、これをデータに合わせて適切な分布になるよう学習したい
step数を十分に大きくして1step当たりのノイズが小さい場合、上記のp, qは同じ分布として表せることが過去の研究からわかっており、その状態に合致するstep数やノイズ付与割合とすることを前提に定式化する。
- VAEと同様に変分下界の最大化を目指す
- pの分散は固定値にして単純化
- pの平均μをニューラルネットワークで表現し、式変形によってノイズ推定問題に置き換え
- 実験によりそちらの方がパフォーマンスがよかったため
で、単純化された目的関数がこちら
 時刻tにおけるノイズ付与されたデータから、そのときに付与された1step分のノイズを予測する形でとてもシンプル。
時刻tにおけるノイズ付与されたデータから、そのときに付与された1step分のノイズを予測する形でとてもシンプル。
実装
実装の参考にしたのはこちら
https://huggingface.co/blog/annotated-diffusion
実装に必要な情報や各部分のコードがわかりやすく解説されている。
方針としては基本的に論文の内容に合わせるが、参考にするコードは上記のページなので完全には一致してないと思われる。また、diffusionのキモはステップごとのノイズ付与による学習と推論の部分なので、その部分に集中できるよう簡略化したtoy datasetを使うことにする。そうすると学習が短時間で済むし、NN部分は単純なMLPにしておけばよいので楽。
実装の全体はこちら
https://github.com/y-kamiya/diffusion/blob/a69af6f41658be7c4d6eabab92c310d38f1df7b9/src/toy.py
学習フローはこちらの通り
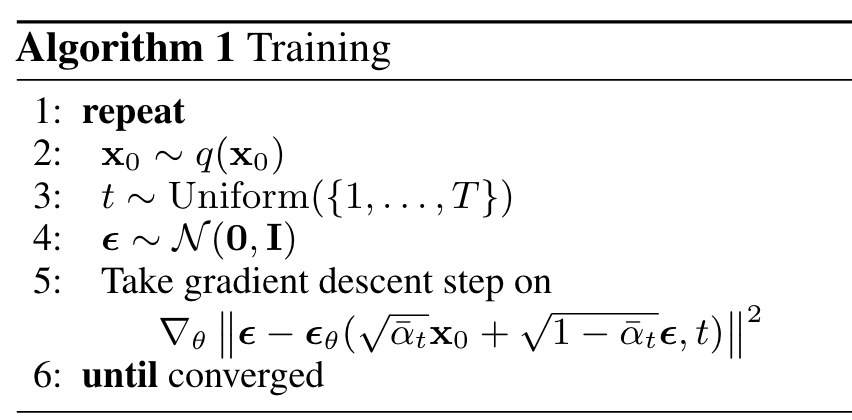
def q_sample(self, x0, t, e=None):
if e is None:
e = torch.randn_like(x0, device=self.config.device)
a_cum = self.a_cum[t].view(-1, 1)
return torch.sqrt(a_cum) * x0 + torch.sqrt(1 - a_cum) * e
def step(self, x):
e = torch.randn_like(x, device=self.config.device)
t = torch.randint(0, self.config.T, (x.shape[0],), device=self.config.device)
input = self.q_sample(x, t, e)
output = self.model(input, t)
loss = nn.functional.mse_loss(output, e)
データと同じ形状のガウシアンノイズとuniformにサンプルした時刻tに対し、その時点でのノイズ付与済みデータをforward processにより計算。それをinputとしてNNに時刻と共に渡し、出力と元のガウシアンノイズで二乗誤差を取ってlossとする。
推論フローはこちらの通り
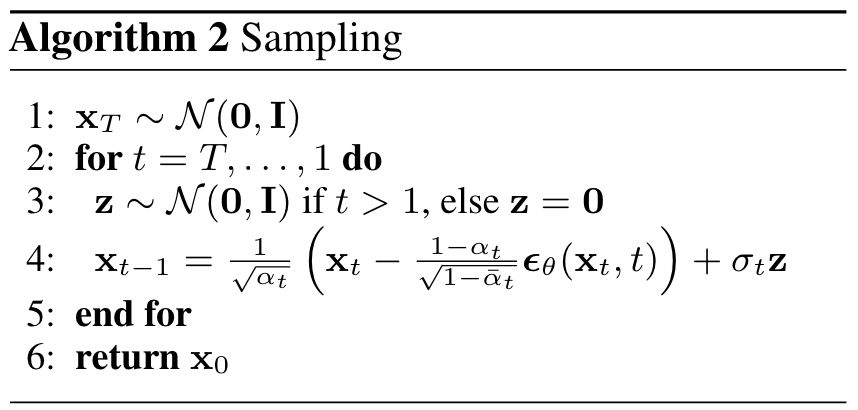
@torch.no_grad()
def sample(self, n: int, xt=None, t_start=None):
...
ts = range(t_start, 0, -1)
for t in ts:
z = torch.randn((n, self.input_dim), device=self.config.device) if t > 1 else 0
e = self.beta[t] / torch.sqrt(1 - self.a_cum[t]) * self.model(xt, torch.tensor(t).repeat(n))
xt = (xt - e) / torch.sqrt(1 - self.beta[t]) + torch.sqrt(self.sigma[t]) * z
論文の図の通りにコード化しただけだが、私は最初はパラメータのルートを取り忘れるなどミスってたので注意。こういうのを間違えるととても時間がかかる(最終的に一つずつ突き合わせてようやく間違いに気づきました)
diffusionに関わるパラメータは論文の通りでbeta(ノイズ付与率)は線形に変化させて元データに近い時刻ほどノイズ付与が小さくなる設定。


beta0 = 1e-4 betaT = 2e-2 self.beta = torch.linspace(beta0, betaT, config.T) self.a_cum = torch.cumprod(1 - self.beta, dim=0) a_cum_prev = torch.cat((torch.Tensor([0]), self.a_cum[:-1])) self.sigma = (1 - a_cum_prev) / (1 - self.a_cum) * self.beta
データセットは以下のどちらかの長さ4の数列
- 初項0~4、等差1
- 初項3~7、等差-1
[0,1,2,3], [1,2,3,4], ..., [4,5,6,7] [7,6,5,4], [6,5,4,3], ..., [3,2,1,0]
画像でいうところだと徐々に濃くなるor薄くなるグラデーションと同じ。画像の場合は8bit分(256階)だが今回はさらに小さく1bit分のみ。DDPMは画像に対して学習しているがそれの空間数、パターン数を極端に小さくしたものというイメージで。
class ToyDataset(utils.data.Dataset):
def __init__(self, dim=4, num_max=8):
self.dim = dim
self.num_max = num_max
data = []
for i in range(num_max - dim + 1):
data.append(list(range(i, i + dim)))
data.append(list(range(i + dim - 1, i - 1, -1)))
self.data = self.normalize(torch.Tensor(data)).repeat(1000, 1)
def __len__(self):
return len(self.data)
def __getitem__(self, index):
return self.data[index]
def normalize(self, x):
return 2 * x / (self.num_max - 1) - 1
def denormalize(self, x):
return (x + 1) * (self.num_max - 1) / 2
モデルに渡す際は各値を[-1, 1]の値にnormalize。これをやらないと学習がまったくうまくいかないので注意(特に最初に実装する際にはこういう部分は忘れやすい)
NNは単純な4層のMLP。隠れ層の次元は適当にデータの次元の100倍にしただけ。capacity不足でlossが小さくならないというのを防ぐためにちょっと大きめにしておいた。
class Model(nn.Module):
def __init__(self, dim, T):
super(Model, self).__init__()
self.dim = dim
self.T = T
self.fc1 = nn.Linear(dim + 1, 400)
self.fc2 = nn.Linear(400, 400)
self.fc3 = nn.Linear(400, 400)
self.fc4 = nn.Linear(400, dim)
def forward(self, x, t):
x = torch.cat((x, t.unsqueeze(-1) / self.T), dim=1)
x = F.relu(self.fc1(x.view(-1, self.dim + 1)))
x = F.relu(self.fc2(x))
x = F.relu(self.fc3(x))
return self.fc4(x)
時刻の印としては、最初の層だけ後ろに正規化した時刻をくっつけるだけにした。
結果
batch sizeの1024は適当、epochsはとても大きい値を設定してるだけで2分くらいのタイミングでCtrl-C。
$ python src/toy.py --batch_size 1024 --epochs 100000 --T 1000 [I 221231 14:04:04 toy:108] start training epoch 0 [I 221231 14:04:04 toy:132] [train] step: 0, loss: 1.257 [I 221231 14:04:04 toy:141] evaluate epoch 0 [I 221231 14:04:04 toy:108] start training epoch 1 [I 221231 14:04:04 toy:132] [train] step: 10, loss: 0.281 [I 221231 14:04:04 toy:108] start training epoch 2 [I 221231 14:04:04 toy:132] [train] step: 20, loss: 0.256 [I 221231 14:04:04 toy:108] start training epoch 3 ...
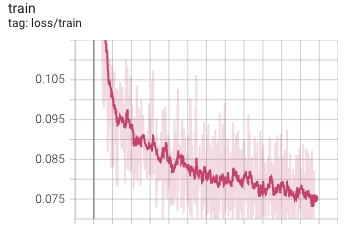
明らかにlossが下がり途中だがクオリティを上げることが目的じゃないので問題なし。
生成した結果(10個のベクトルを出力)
# 完全なノイズからの推論
$ python src/toy.py --T 1000 --sample_only
tensor([[1.9517, 3.0958, 3.9844, 5.0628],
[6.0427, 4.9173, 4.0149, 2.8960],
[4.1620, 5.0492, 6.0242, 7.0173],
[0.0311, 1.0536, 1.9632, 2.9813],
[3.9050, 2.9529, 1.9828, 1.0020],
[3.9972, 2.9883, 2.0320, 1.0342],
[6.1256, 5.0441, 4.0963, 2.9597],
[7.0356, 6.0315, 5.0716, 4.0767],
[6.0292, 4.9431, 3.9080, 2.9789],
[3.0652, 4.0415, 5.0707, 6.0714]])
# 初期状態指定で10ステップ分のみ推論
$ python src/toy.py --T 1000 --sample_only --name a --sample_from 1 2 3 4 --sample_t_start 10
tensor([[1.0400, 2.0241, 3.0691, 4.0281],
[0.9813, 2.0192, 3.0408, 4.0111],
[1.0063, 2.0051, 2.9564, 3.9855],
[1.0027, 2.0341, 2.9496, 4.0725],
[0.9470, 1.9784, 2.9939, 3.9557],
[1.0036, 1.9669, 3.0339, 3.9634],
[0.9800, 1.9579, 2.9750, 4.0107],
[1.0122, 1.9750, 2.9788, 3.9863],
[1.0134, 2.0207, 3.0561, 4.0768],
[1.0227, 1.9658, 2.9960, 3.9897]])
増えるパターンも減るパターンも表れており、初項もバラけているようにみえる。値自体もだいたいデータセットで定義した整数値に近いものになった。中間状態からの推論も指定した値に収束している。
デバッグという意味で時間がかかった部分をメモしておく
- 論文の式におけるパラメータの実装ミス
- データセットのnormalize, denormalizeがズレていた
- 結果として等差が0.7くらいの出力になったのだがおかしい部分に気づくまで時間がかかった
- 学習率が大きすぎた
- lossが小さくならない
まとめ
ひとまず実装してみて大枠として意図通り動いていそうな結果になった。U-NetやAttentionまわりの勉強も兼ねてその辺のも実装してみようか考え中。
実装しながら思ったこととして、一つのモデルをすべてのtに対して学習している点が面白い気がした。元の画像に対しノイズを付与して少しずつ変化させた画像を学習データとして使うので、augmentationやRNNの効果もアルゴリズムに組み込まれているのかもと思った。
理論的な話の部分でも、エネルギーベースモデルとの関連など知っていきたい部分があるのでdiffusionに関してはもう少し勉強したいと思う。
deviation networkの実装とパッケージ化
テーブルデータの異常検知モデルとしてdeviation networkというのがある。
paper: https://arxiv.org/abs/1911.08623
repo: https://github.com/GuansongPang/deviation-network
それまでの精度が高めなdeep learningを活用した異常検知モデルは2ステップによるアプローチが多く、以下のような2段構成になっていた。
- 入力データから教師なし学習によって特徴量を抽出
- 抽出された特徴量から異常度合いを表すスコアを算出
異常スコアを計算とそのための特徴抽出を別々に行うために異常を検出するための適切な特徴を表現できていない場合があることや、特徴抽出に教師なし学習を用いることで既知の異常データを利用することができないなどの問題点があった(2019年の論文であることに注意)
この点を解決するため、1ステップで直接異常スコアを計算でき、かつ少数の異常データを事前知識として活用できる弱教師あり学習としたのがdeviation network。
特徴をざっくりまとめると
- 異常データは正常データに比べて極めて少ないこと仮定
- 異常データを事前知識として学習してスコアに反映されることが可能
- 学習
- 既存の手法で主である2ステップな手法と異なり
- データから直接異常スコアを計算するため学習・予測ともに速い
- データの性質をより反映した形で異常スコアを算出できる
公式実装はgithubに上がっており試しに動かしてみるのは簡単にできる。readmeに書いてある通りで動くが以下の部分でデータセット名がハードコードされるので消してから動かすとよい。
https://github.com/GuansongPang/deviation-network/blob/179a74a/devnet.py#L232
また、論文で書かれたデータセットはこちらに置かれている。
https://github.com/GuansongPang/ADRepository-Anomaly-detection-datasets/tree/b32bb0a/numerical%20data/DevNet%20datasets
pytorchによる自前実装
上記1ファイルにほぼすべての処理が入っておりシンプルでわかりやすいものの、個人的によく使うのがpytorchなのと勉強も兼ねてpytorchで実装してみたのがこちら。
https://github.com/y-kamiya/devnet
概要としては
- そもそもシンプルな処理であることと、簡単のためにtrainer.pyとしてほとんどを1ファイルに収めた
- 公式実装で入っていた実験用の処理は除いた
- networkは隠れ層が1層だけのもののみ(論文中でdefaultと書かれたもの)
- ダミーデータの追加によって異常データ数を指定された値に揃える処理は削除
- 入力データが疎行列である場合の対応は削除(公式実装でdata_format=1の場合)
- 学習後の結果表示を追加
こちらのデータに対して実行して公式実装の結果と比較
https://github.com/GuansongPang/ADRepository-Anomaly-detection-datasets/blob/b32bb0a389c9f36136bf9be818d095b68bae45aa/numerical%20data/DevNet%20datasets/annthyroid_21feat_normalised.csv
公式実装の実行結果
annthyroid_21feat_normalised: round 0 Original training size: 5760, No. outliers: 427 5760 427 5333 0 Training data size: 5760, No. outliers: 427 ... $ python devnet.py --data_format 0 --input_path dataset/ --network_depth 2 --runs 1 --epochs 20 --known_outliers 427 --cont_rate 0 --data_set annthyroid_21feat_normalised --ramdn_seed 42 Epoch 19/20 20/20 [==============================] - 0s 20ms/step - loss: 2.0970 Epoch 20/20 20/20 [==============================] - 0s 19ms/step - loss: 2.0551 AUC-ROC: 0.7483, AUC-PR: 0.2501 average AUC-ROC: 0.7483, average AUC-PR: 0.2501
同じdatasetに対する今回の実装による実行結果
$ python src/main.py dataroot=data/debug epochs=20 eval_interval=20 random_seed=42 ... ============================== TableDataset TRAIN data shape: torch.Size([5760, 21]) n_inliner: 5333 n_outliner: 427 ============================== [train] epoch: 0, loss: 2.45, time: 0.09 phase: Phase.EVAL, load data from devnet/data/debug/eval.csv ============================== TableDataset EVAL data shape: torch.Size([1440, 21]) n_inliner: 1333 n_outliner: 107 ============================== ... [train] epoch: 18, loss: 1.98, time: 0.09 [train] epoch: 19, loss: 1.92, time: 0.10 [eval] epoch: -1, AUC-ROC: 0.7452, AUC-PR: 0.2356
seedを指定することで実行のたびに結果が同じになることは確認済み。完全に結果が一致していないものの近い値となった。
また、手元ではkedroと組み合わせて試していたこともあり、packageとして使えた方が便利だったためpypiにも上げてみた。
https://pypi.org/project/devnet/
poetryで管理していたこともあって簡単にpackage化できたというのも理由の一つ。packageを上げるのは今回初めてだったがweb上の情報を元にとても簡単にできた。